

三維平衡-儀由兩部分組成
一、陀螺儀傳感器+嵌入式系統(運動控制單元)
陀螺儀原理:
系統組成:
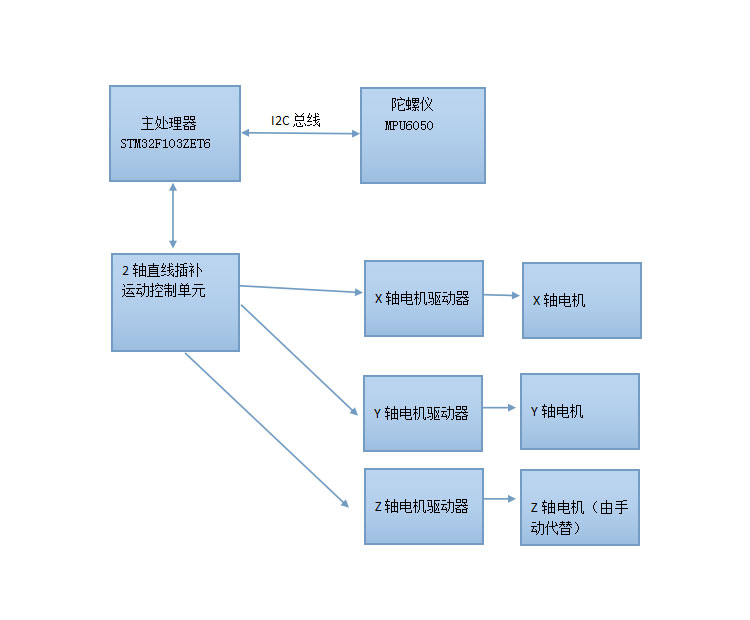
I2C總線
1. MPU6050是一款6軸陀螺儀,為全球首例整合性6軸運動處理傳感器。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計,以及一個可擴展的數字運動處理器DMP,可用I2C接口連接一個第三方的數字傳感器,比如磁力計。擴展之后就可以通過其I2C或SPI接口輸出一個9軸的信號(SPI接口僅在MPU-6000可用)。MPU-60X0也可以通過其I2C接口連接非慣性的數字傳感器,比如壓力傳感器。 MPU-60X0對陀螺儀和加速度計分別用了三個16位的ADC,將其測量的模擬量轉化為可輸出的數字量。為了精確跟蹤快速和慢速的運動,傳感器的測量范圍都是用戶可控的,陀螺儀可測范圍為±250,±500,±1000,±2000°/秒(dps),加速度計可測范圍為±2,±4,±8,±16g。 一個片上1024字節的FIFO,有助于降低系統功耗。 和所有設備寄存器之間的通信采用400kHz的I2C接口或1MHz的SPI接口(SPI僅MPU-6000可用)。對于需要高速傳輸的應用,對寄存器的讀取和中斷可用20MHz的SPI。另外,片上還內嵌了一個溫度傳感器和在工作環境下僅有±1%變動的振蕩器。
相較于多組件方案,免除了組合陀螺儀與加速器時之軸間差的問題,減少了大量的包裝空間。
2.主處理器是一款性能強大的32位微控制器。
高72MHz工作頻率,在存儲器的0等待周期訪問時可達1.25DMips/MHZ,
片內Flash為512k字節,片內RAM為64K字節。
3、主處理器每隔10ms讀取MPU6050陀螺儀的三軸的加速度,配合姿態解算器,運用動態卡爾曼濾波算法,準確解算出X軸和Y軸的傾角。姿態測量精度0.01度。
4、根據X軸和Y軸的實際傾角,實時調整X軸和Y軸的位置。終控制兩軸的姿態平衡。
5、Z軸上的升降部分,由于傳感器成本問題無法完成,需要手動進行。如果成本問題可以解決,可以實現自動。可采用的測距方案有:1.氣壓高度計,利用海拔越高,氣壓越低的原理。精度很低2. 超聲波測距儀,通過發射器發出超聲波,被物體反射后,到達接收器的時間差,根據時間差計算距離。比較精確,便宜。3. 雷達測距儀,原理與超聲波測距儀類似,同樣靠發射來測距,只不過超聲波換成了電磁波。比較精確,較貴。
嵌入式系統(運動控制單元)原理:
此嵌入式系統為運動控制單元(步進電機控制器),通常是指在復雜條件下,將預定的控制方案、規劃指令轉變成期望的機械運動,實現機械運動精確的位置控制、速度控制、加速度控制、轉矩或力的控制。(此嵌入式部分為外協處理,告知對方原理,對方編寫的一套同步控制軟件內嵌與其中)
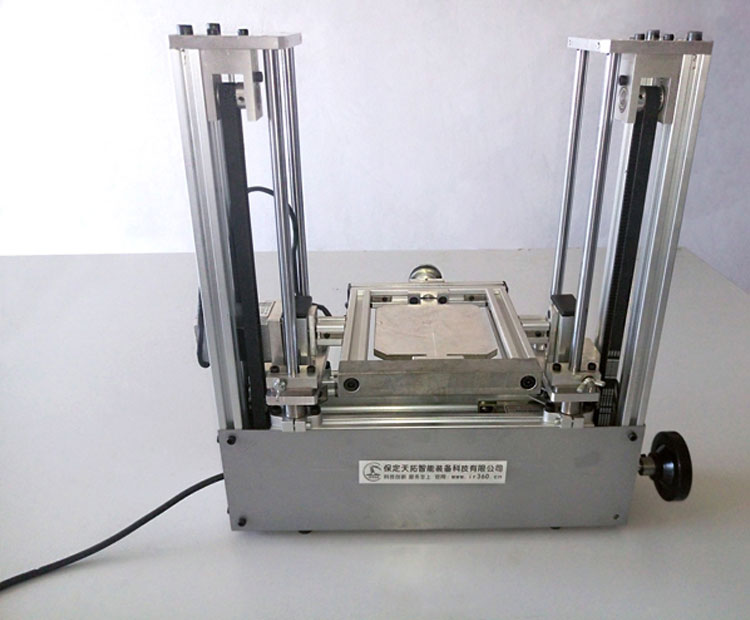
二、三維機械平臺
1.步進電機

步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
工作原理
當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
2.步進電機驅動器(此設備選擇為微控寶系列步進電機驅動器,體積小,重量輕)

步進電機驅動器是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速和定位的目的。
3.同步帶

同步帶是以鋼絲繩或玻璃纖維為強力層,外覆以聚氨酯或氯丁橡膠的環形帶,帶的內周制成齒狀,使其與齒形帶輪嚙合。同步帶傳動時,傳動比準確,對軸作用力小,結構緊湊,耐油,抗老化性能好,一般使用溫度-20℃―80℃,v<50m>
4.同步輪

同步輪傳動是由一條內周表面設有等間距齒的環形皮帶和具有相應齒的帶輪所組成,運行時,帶齒與帶輪的齒槽相嚙合傳遞運動和動力,它是綜合了皮帶傳動、鏈傳動齒輪傳動各自優點的新型帶傳動。
5.電機支架

步進電機連接架,市面上有成型的標準產品,方便電機與架體(主體)相連接
6.機械平臺(20型材及角件組成)
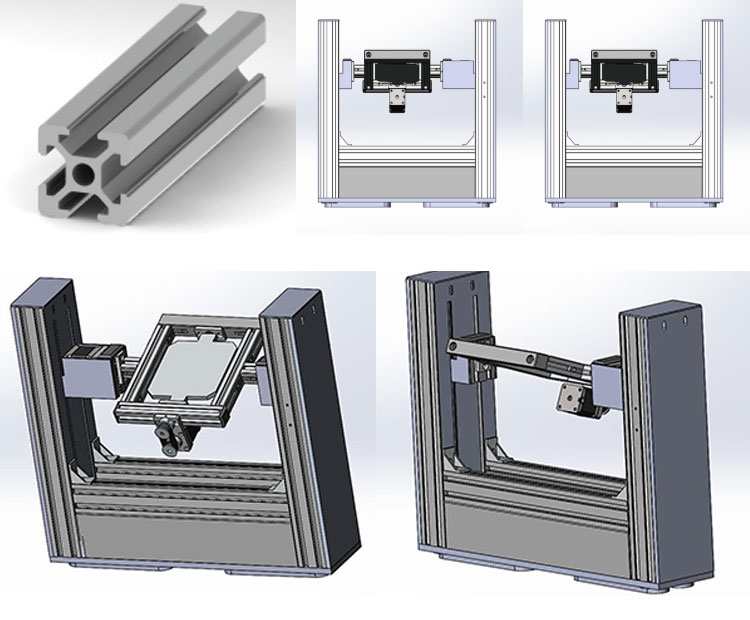
以鋁型材20系列為主,通過角連接件連接,按照需求切割成一定角度后拼裝成需要的結構,優點是結實、輕巧、易組裝、經濟
7.配重
任何可以方便安裝的重物,完全為解決結構偏心而增加,減少電機轉動時力量的分配問題


 首頁
首頁 電話
電話 產品
產品